Ever since starting my degree in Mechatronic Engineering, the one thought that has kept me awake at nights was my Final Year Project. Unlike many of my peers, I always believed that your Final Year Project defines who you are as an engineer and your capabilities as well as ambition. I have been hoping not to be stuck with a topic that did not interest me and furthermore extinguish my willingness to go deep into the project itself and I am glad to say that I am rewarded with a topic that both excites and frightens me. And I’m relishing this challenge!
Although the official paperwork at my university is not completed yet, it is all but confirmed that my Final Year Project will be on “Designing and Developing a Swarm of quad-copters for the purpose of monitoring deforestation”. This is brilliant as over the past 14 months or so, Swarm robotics has been a fascination that just seemed a bit out of reach for me, due to study commitments. Now that they overlap, I can’t to delve deep into it. For this week, I will do an introductory post outlining how the overall system should work and what are the major questions about the operation of the system that I need to answer in the upcoming weeks.
Swarm robotics is a field of multi robotics, inspired by insect behaviour, in which multiple robots are coordinated in a distributed manner. Usually Swarm robotics makes use of simple robots working together to tackle complex tasks through the use of local rules. For the purpose of this project, the robot will be a quad-copter. For the application of this project, a dynamic model for the swarm must me implemented so that the swarm can behave according to interaction with elements of the real world.
For this project to be considered successful, the overall system must at least satisfy the following project objectives:
- Develop multiple quad-copters that are controlled wirelessly integrated with appropriate instrumentation to collect relevant data about the environment around them.
- Develop a stable aerodynamic model for the quad-copters to operate.
- Develop a dynamic swarm robotic model which allows the quad copters to work together and compensate for each others behaviours.
- Develop adequate user interface to make use of the data collected by the quad copters (i.e. monitoring system)
Apart from these objectives, it is a given that the quad-copters should be designed with safety protocols to protect themselves as well as the environment in which they operate. The main application of the project remains monitoring deforestation, therefore the project must also consider the working range of the quad copters to be as a long range application.
The following is a block diagram depicting the overall system (This model is subject to change as needed in the future):
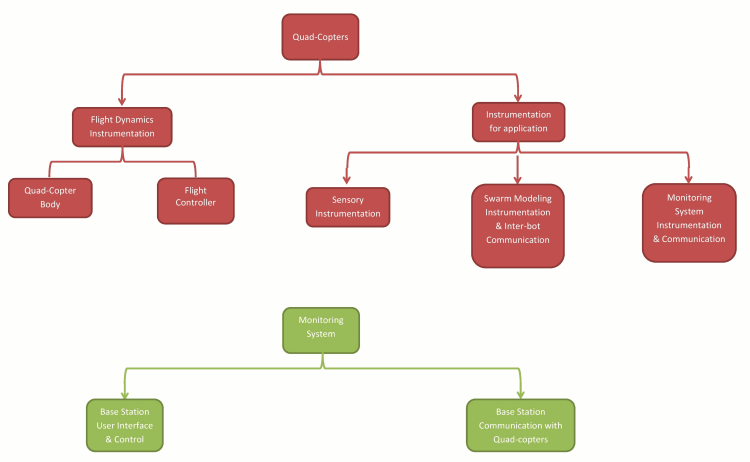
Over the upcoming weeks I will be exploring the components outlined in the block diagram, (starting from the Quad-Copter dynamics and control). The general methodology to tackle this project is to either build a few quad copters or buy them, replace their basic flight controllers with a new programmable one, and proceed from there to program the quad-copters with the appropriate models necessary for operation. A base station (most likely a laptop with adequate GUI software) will be used for the monitoring data processing and also to program the bots for a specific task or search area. I will also be looking to answer some important questions pertaining to the operation of the Quad-Copter such as :
– Obtaining the Quad-Copter itself? (Build one or buy one)
– Which controller to use for the quad-copter? (Arduino, PIC, TI Tiva board etc.)
– How to perfect the quad-copter flight dynamics with the controller?
– What sensors are crucial to the application & how to implement them? (Gyroscopes, Accelerometer, IR sensors etc.)
– How will the quad-copters know where they are in relation to their surroundings and other bots? (Sensor skirting, bot-bot comm, GPS etc.)
– How to implement the monitoring systems?
– How to implement inter-bot communication and communication with base station?
I will list down more problems and corresponding solutions as I face them. The overall system is also envisioned to include additional features such as Auto-Return for Battery Recharge, Crash safety protocols etc. but for now, the objectives outlined above are the main focus and must be met before moving on to additional feature.
I guess that’s all for this week. In next week’s post I will present my arguments for and against and come up with a conclusion for the best way forward. I will also present a preliminary Gantt Chart depicting the proposed timeline for the project and its specified parts. See you all next week.
0 Comments